Digital Twin
In-process geometry · deviation maps
Research portfolio — computer vision, AI & robotics, and geometric digital twins for robotic manufacturing.
Expertise
In-process geometry · deviation maps
Multi-sensor · 4D tracking
ROS2 · AM cells · fusion
Defect models · VLM pipelines
Work
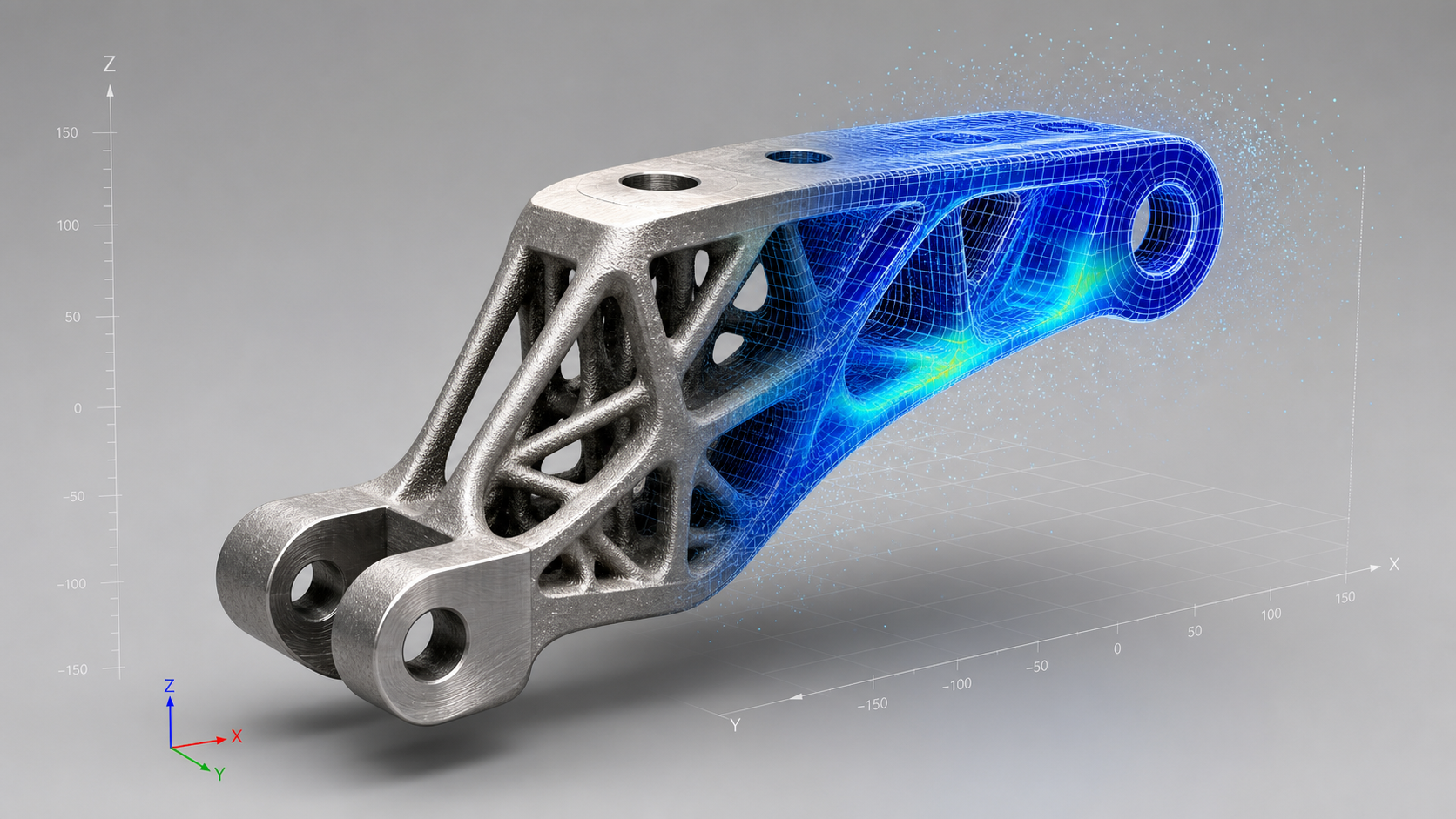
Live deposition geometry vs design — in-process QA on robotic AM.
Closed-form two-stage — faster multi-sensor cell deployment.
Paper →
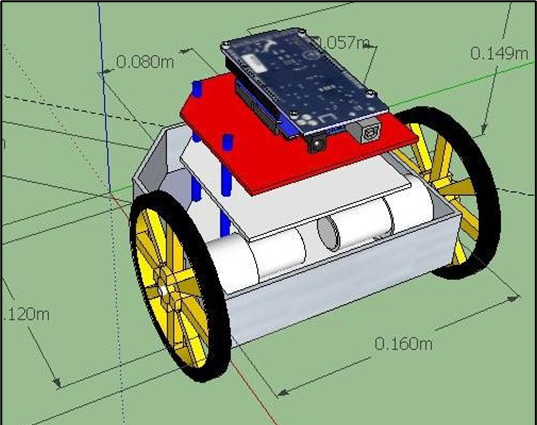

Patent 2025904901 · ROS2 labs · architectural digitisation.


Proof
Stack
Vision pipelines · ROS2 labs
CCTV & solar PV deployment
4 RCIM papers · cold spray AM
C/C++ · Python · embedded
Golden Key · NRNA award
Nepali Keto · IEEE solar MPPT